Konecranes Portal
Konecranes Portal is your single point of access to our digital customer platforms for industrial crane maintenance information and TRUCONNECT data, plus our store for spare parts, accessories and manuals.
Konecranes Portal is your single point of access to our digital customer platforms for industrial crane maintenance information and TRUCONNECT data, plus our store for spare parts, accessories and manuals.


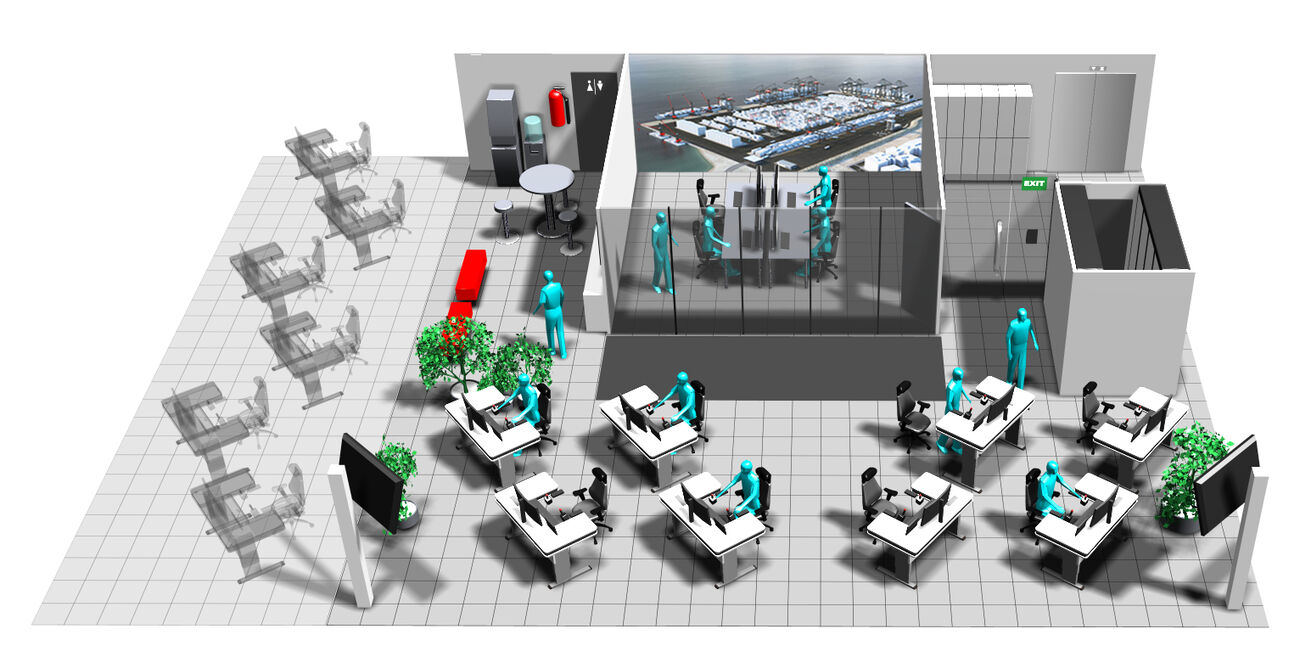
The Remote Operating Station (ROS) is a comfortable workstation for the human remote operators who remotely carry out the truck loading and unloading operations in the automated container stacks. Truck loading and unloading must be carried out by human operators for safety reasons. In a container terminal, a number of ROSs are working in a remote control room which is a comfortable office environment for personnel.
The GUI of the ROS is field-proven in a number of Konecranes ARMG and ARTG systems working around the world. The ARMG and ARTG systems feature a number of improvements related to the advanced machine vision system that works closely with the Active Load Control systems on the ARMG and ARTG cranes.
The Graphical User Interface (GUI) of the Remote Operating Station (ROS) gives highly intuitive and precise control over truck loading and unloading.